
摘要:本文探讨了马斯克方案的未来走向,重点关注纯视觉与激光雷达技术的融合之路。随着自动驾驶技术的不断发展,纯视觉和激光雷达技术成为关键领域。马斯克方案致力于将这两种技术融合,以提高自动驾驶的精度和可靠性。随着技术的不断进步和成本的不断降低,纯视觉与激光雷达的融合将成为自动驾驶领域的重要趋势。本文分析了这一趋势的可行性和前景,并探讨了面临的挑战和机遇。
算力要求高,门槛高
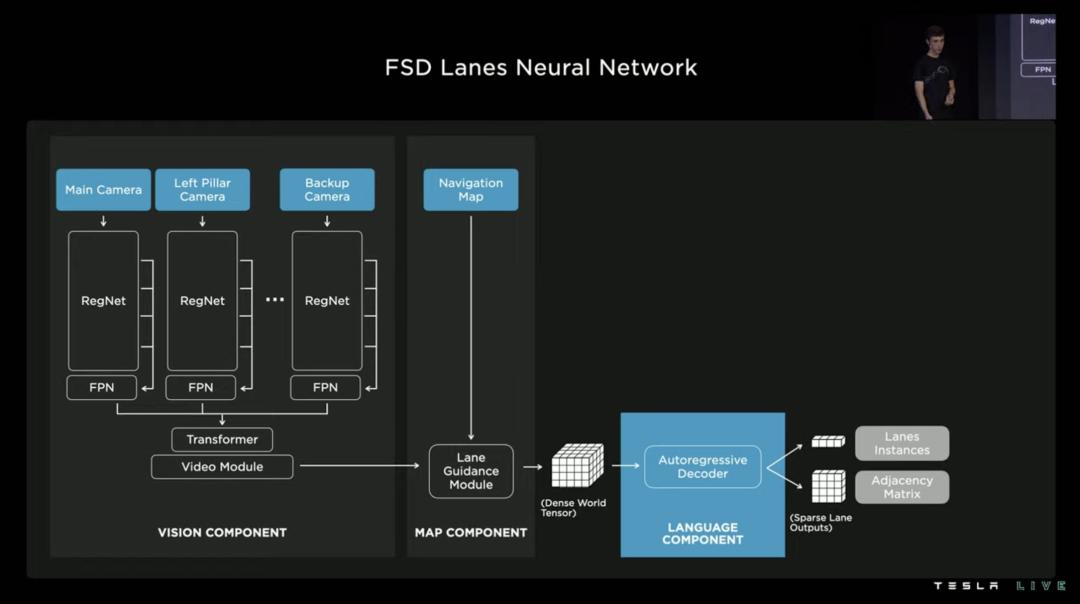
马斯克的纯视觉方案主要依赖高性能摄像头和强大的计算能力,通过神经网络对大量图像数据的训练,自动驾驶系统能够识别道路、车辆、行人以及其他障碍物,从而实现自动驾驶,该方案具有高度的灵活性和适应性,能在各种环境和天气条件下运行,纯视觉方案也面临一些挑战。
对算力的要求非常高,随着摄像头捕捉到的图像数据量不断增加,处理这些数据需要强大的计算能力,特斯拉在自家的硬件和软件方面投入了大量研发力量,以提高数据处理能力,对于大多数公司来说,要达到类似特斯拉的计算能力仍然是一个挑战。

激光雷达方案:暂时成本稍高但门槛低
与纯视觉方案不同,激光雷达方案主要依赖激光雷达技术来感知周围环境,激光雷达能够发射激光束并接收反射回来的信号,从而获取周围环境的精确三维信息,这种方案具有高精度和可靠性的优点,使得自动驾驶系统在复杂的交通环境中能够更准确地感知周围环境,激光雷达方案也面临一些挑战。
成本相对较高,尽管随着技术的不断发展,激光雷达的成本正在逐渐下降,但与摄像头和传感器相比,其成本仍然较高,这对于大多数公司来说仍然是一个挑战,尤其是在大规模生产和部署方面。
虽然激光雷达技术相对成熟,但其门槛仍然不低,安装和配置激光雷达系统需要专业的技术和知识,同时还需要对激光雷达数据进行处理和分析,这对于许多公司来说仍然是一个挑战,需要投入大量的研发力量。

未来走向:纯视觉与激光雷达的融合
面对纯视觉方案和激光雷达方案的优势和挑战,未来的自动驾驶技术可能会走向二者的融合,纯视觉方案具有高度的灵活性和适应性,而激光雷达方案则具有高精度和可靠性,通过将这两种方案融合,可以弥补彼此的不足,提高自动驾驶系统的性能和可靠性。
随着技术的不断发展,纯视觉方案和激光雷达的成本都在逐渐下降,这使得融合两种方案成为可能,同时也降低了自动驾驶技术的门槛,融合方案还可以提高自动驾驶系统的安全性,通过结合视觉和激光雷达数据,可以更加准确地感知周围环境,从而减少误判和事故发生的可能性。
这种融合方案将结合两种技术的优点,提供更全面、更准确的感知能力,从而推动自动驾驶技术的更快发展,要实现这种融合还需要大量的研发和创新,我们期待着未来自动驾驶技术的更多突破和创新。
马斯克提出的纯视觉方案和激光雷达方案各有优势和挑战,未来的自动驾驶技术可能会是这两种方案的融合,以提供更高级别的自动驾驶性能和安全性,随着技术的不断进步和成本的降低,我们有望在未来看到更多创新性的自动驾驶解决方案。
 沪ICP备2023023919号-1
沪ICP备2023023919号-1